
Design and manufacturing of a six-axis robot laser welding workstation
The six-axis robot laser welding workstation is a highly automated system designed for welding various alloy materials, including aluminum, copper, nickel, stainless steel, and titanium alloys. It integrates a six-axis robot for flexible movement, a laser for high-precision welding, and a positioner for accurate workpiece positioning. The workstation offers high efficiency and quality in welding complex-shaped workpieces. Its components, such as the robot, laser, and positioner, are selected based on specific application requirements. This system is widely used in industries like automotive and aerospace for its ability to handle different materials and achieve precise welding results.
Here is the detailed description of the six-axis robot laser welding workstation, including the types of alloy materials it is suitable for welding, as well as data sheets for the robot, laser, and positioner:
Design and Manufacturing of the Six-Axis Robot Laser Welding Workstation
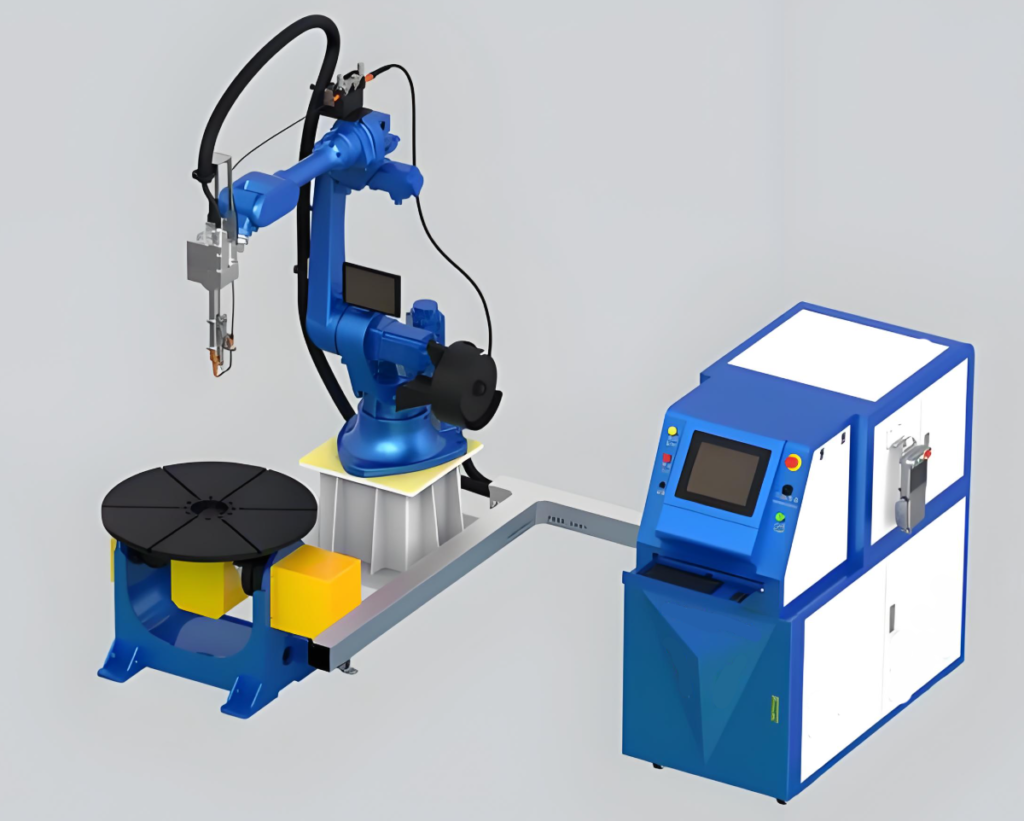
The six-axis robot laser welding workstation is a highly automated and precision welding equipment, consisting of a six-axis robot, laser, positioner, and other main components. It offers advantages such as high automation, efficient processing, and high-precision welding, enabling precise welding of complex-shaped workpieces. When designing and manufacturing, it is necessary to take into account various aspects, including robot selection, laser configuration, positioner design, safety protection, and control system integration.
Suitable Alloy Materials for Welding
The six-axis robot laser welding workstation is suitable for welding a variety of alloy materials, including but not limited to the following:
- Aluminum Alloys: Such as 3xxx, 5xxx, 6xxx aluminum alloys, and 3003 aluminum alloy. Aluminum alloys have a high thermal conductivity, and laser welding can achieve high-quality and efficient welding. For example, in the automotive manufacturing field, aluminum alloy car door laser welding workstations using 5xxx aluminum alloy as the processing material can realize 3mm + 3mm lap welding.
- Copper Alloys: Copper and copper alloys have excellent electrical and thermal conductivity, and laser welding technology can effectively solve their welding challenges. For example, when using green light laser to weld copper alloys, the threshold power for copper deep penetration welding can be significantly reduced, and the amount of molten spray and spatter on the weld surface is minimal.
- Nickel Alloys: Laser welding can be used for welding between nickel alloys and other materials such as titanium, as well as for welding nickel alloys themselves.
- Stainless Steel: Laser welding is suitable for welding thin stainless steel plates, as well as materials like 304 stainless steel.
- Titanium Alloys: Titanium alloy laser welding technology has important applications in the aerospace field, and laser welding can be used for welding between titanium alloys and other materials such as steel, aluminum, magnesium, nickel, etc.
Data Sheet for the Six-Axis Robot
| Parameter Name | Parameter Value |
|---|---|
| Model | To be selected based on actual use |
| Degrees of Freedom | 6 |
| Maximum Payload Capacity | To be selected based on actual use |
| Working Range | To be selected based on actual use |
| Repeatability | ±0.02mm (example) |
| Maximum Travel Speed | To be selected based on actual use |
| Control Method | Servo control |
Data Sheet for the Laser
| Parameter Name | Parameter Value |
|---|---|
| Model | To be selected based on actual use |
| Laser Type | Fiber laser, green light laser, blue light laser, etc. |
| Output Power | To be selected based on actual use |
| Beam Quality | M²<1.3 (example) |
| Wavelength | 1070nm (example for fiber laser), 515nm (example for green light laser), 450nm (example for blue light laser) |
| Pulse Frequency | To be selected based on actual use |
| Cooling Method | Water cooling |
Data Sheet for the Positioner
| Parameter Name | Parameter Value |
|---|---|
| Model | To be selected based on actual use |
| Load Capacity | To be selected based on actual use |
| Rotation Angle | ±180° (example) |
| Rotation Speed | To be selected based on actual use |
| Positioning Accuracy | ±0.1° (example) |
| Control Method | Servo control |
It should be noted that the actual data for the six-axis robot, laser, and positioner need to be selected and customized based on the specific application scenario and workpiece requirements.
Here are the key points for the design and manufacturing of a six-axis robot laser welding workstation:
Robot Selection
- Payload Capacity: Choose a robot with sufficient payload capacity to stably carry the workpiece during welding.
- Working Range: Select a robot with a working range that covers the entire welding area based on the size and welding trajectory of the workpiece.
- Repeatability: High repeatability is crucial for welding quality, typically requiring precision within ±0.02mm.
Laser Configuration
- Laser Type: Select a fiber laser, green light laser, or blue light laser based on the welding material and process requirements.
- Output Power: Choose the appropriate laser power based on the melting point of the welding material and the required welding speed.
- Beam Quality: Beam quality directly affects the welding outcome, so a laser with good beam quality is usually selected.
Positioner Design
- Load Capacity: The positioner must have sufficient load capacity to support the weight of the workpiece.
- Rotation Accuracy: High rotation accuracy ensures precise positioning of the workpiece during welding.
- Movement Speed: Reasonable movement speed improves welding efficiency while avoiding damage to the workpiece.
Safety Protection
- Laser Shielding: Prevent laser radiation from harming operators.
- Emergency Stop Button: Allows for immediate shutdown of the equipment in emergencies to ensure personnel safety.
Control System Integration
- Coordinated Control: Achieve coordinated operation between the robot, laser, and positioner to ensure smooth welding processes.
- User Interface: Provide a user-friendly interface for convenient parameter setting and monitoring by operators.
- Fault Diagnosis: Include fault diagnosis capabilities to promptly detect and address issues during equipment operation.
These key points are essential for the design and manufacturing of a six-axis robot laser welding workstation, as they collectively determine the performance and welding quality of the workstation.